
Задача 2. Найти координаты Xc и Yc точки С, если известны координаты XВ и YВ точки B, длины (горизонтальные проложения) dBC линии BC и дирекционный угол αBC этой




![]()
![]()
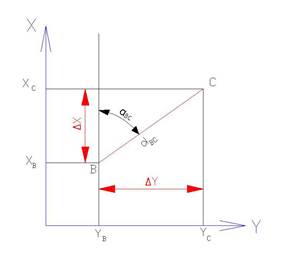
Найти координаты Xc и Yc точки С, если известны координаты XВ и YВ точки B, длины (горизонтальные проложения) dBC линии BC и дирекционный угол αBC этой линии. Координаты точки B берутся одинаковыми для всех вариантов:
XB = +1891,67 YB = +2719,07 dBC = 37,86 м
Дирекционный угол αBC линии BC следует взять из решения предыдущей задачи. Координаты точки С вычисляются по формулам XC = XB + ΔXBC; YC = YB + ΔYBC
Где ΔXBC и ΔYBC – приращение.
Приращения вычисляются по формулам ∆x = d cosα ∆y = d sinα
Приращение – изменение координат X и Y (число, на которое изменилась координата, или разность координат предыдущей и следующей точек).
Вычисление приращений выполняют с помощью румбов. Дирекционный угол следует предварительно перевести в румб, пользуясь таблицей 1. В этом случае
 |
∆x = d cos α ∆y = d sin α
При вычислении приращений координат значения румбов следует округлить до целых минут. Знаки приращений определяют в зависимости от названия румба (табл. 2).

Таблица 1 Таблица 2
| Приращения | Названия румбов | |||
| СВ | ЮВ | ЮЗ | СЗ | |
| ΔX ΔY | + + | − + | − − | + − |
Перевод дирекционных углов в румбы
Знаки приращений прямоугольных координат
Пример:
Вычислить приращения координат, если дано: dBC = 239,14 м αBC = 19˚ 35΄
В соответствии с рисунком 2 и таблицей 1 румб линии BC rBC = СВ: 19˚ 35΄
Знаки приращений координат определяем по названию румба – СВ
Решение задачи 1 и 2 непосредственно не контролируется. К их решению надо подойти особенно внимательно, так как вычисленные координаты XC и YC точки С и дирекционный угол αI-II будут использованы в следующем задании.
Задание 2. Составление топографического плана участка
Исправление и перевод румбов
Исправление и перевод румбов
Исправление и перевод румбов
Таблица румбов
NE-ая четверть:
| Номер румба | Наименование румба | Число градусов |
| N | ||
| NtE | 11,25 | |
| NNE | 22,5 | |
| NEtN | 33,75 | |
| NE | ||
| NEtE | 56,25 | |
| ENE | 67,5 | |
| EtN | 78,75 | |
| E |
SE-ая четверть:
| Номер румба | Наименование румба | Число градусов |
| S | ||
| StE | 11,25 | |
| SSE | 22,5 | |
| SEtS | 33,75 | |
| SE | ||
| SEtE | 56,25 | |
| ESE | 67,5 | |
| EtS | 78,75 | |
| E |
SW-ая четверть:
| Номер румба | Наименование румба | Число градусов |
| S | ||
| StW | 11,25 | |
| SSW | 22,5 | |
| SWtW | 33,75 | |
| SW | ||
| SWtW | 56,25 | |
| WSW | 67,5 | |
| WtS | 78,75 | |
| W |


NW-ая четверть:
| Номер румба | Наименование румба | Число градусов |
| N | ||
| NtW | 11,25 | |
| NNW | 22,5 | |
| NWtN | 33,75 | |
| NW | ||
| NWtW | 56,25 | |
| WNW | 67,5 | |
| WtN | 78,75 | |
| W |
Ориентирование корабля в море
§ 9. Истинный курс, истинный пеленг и курсовой угол
При решении основных задач кораблевождения постоянно возникает необходимость определять направление движения корабля и направления с корабля на различные объекту.
Направление движения корабля определяется положением его диаметральной плоскости относительно плоскости истинного меридиана, т. е. его истинным курсом. Истинный курс (ИК) есть двугранный угол между плоскостью истинного меридиана и носовой частью диаметральной плоскости корабля (смотрите рисунок). Этот двугранный угол измеряется углом в плоскости истинного горизонта между северной частью линии истинного меридиана и линией курса корабля. Под линией курса корабля понимается след от сечения плоскости истинного горизонта диаметральной плоскостью корабля.
Направление на какой-либо наблюдаемый объект определяется двугранным углом между плоскостью истинного меридиана наблюдателя и вертикальной плоскостью, проходящей через место наблюдателя и наблюдаемый объект. Этот угол называется истинным пеленгом (ИП). В плоскости истинного горизонта истинный пеленг измеряется плоским углом между линией истинного меридиана и линией пеленга. Линией пеленга является прямая линия, по которой пересекается плоскость истинного горизонта с вертикальной плоскостью, проходящей через место наблюдателя и наблюдаемый объект.
В принципе и истинный пеленг и истинный курс могут отсчитываться в любой системе счета направлений. Однако основной системой является круговая, в которой истинный курс и истинный пеленг отсчитываются от северной части меридиана наблюдателя по ходу часовой стрелки от 0 до 360°. Направление, отличающееся от истинного пеленга на 180°, называется обратным истинным пеленгом (ОИП). 
Направления с корабля на различные объекты иногда определяются не относительно истинного меридиана, а относительно диаметральной плоскости корабля, т. е. курсовыми углами. Курсовым углом (КУ или q) называется угол между носовой частью диаметральной плоскости корабля и направлением на наблюдаемый объект. Счет курсовых углов ведется по двум системам. По полукруговой системе счет курсовых углов ведется вправо и влево от носовой части диаметральной плоскости корабля в пределах от 0 до 180°. Курсовым углам в этой системе счета приписывается наименование правого или левого борта (смотрите рисунок), а для аналитических расчетов знаки: плюс—для курсовых углов правого борта и минус — для курсовых углов левого борта. Счет курсовых углов может вестись и по круговой системе. Тогда курсовые углы отсчитываются от носовой части диаметральной плоскости по движению часовой стрелки от 0 до 360°.
Истинный курс, истинный пеленг и курсовой угол связаны между собой зависимостью
ИП = ИК + КУ. (20)
Эта зависимость легко устанавливается из рассмотрения рисунка. При подстановке в эту формулу величины курсового угла, выраженного в полукруговом счете, нужно учитывать его знак, определяемый наименованием борта, с которого наблюдается объект.
Если результат вычисления по приведенной формуле окажется больше 360°, то из него нужно вычесть 360°. Если при вычислении в правой части окажется отрицательная величина (при КУл.б), то для получения ИП полученную величину нужно вычесть из 360°.
Пример 1. ИК=78°, КУ=66°п. б. Определить ИП и ОИП.
Решение.
ИП = 78° + ( + 66°) = 144°. ОИП = 144° + 180° = 324°.
Пример 2. ИК == 295°, КУ = 133° л. б. Определить ИП и ОИП.
Пример 3. ИК =194°, ИП = 70°. Определить КУ.
Решение. КУ = 70°—194° = —124° = 124°л.б
Пример 4. ИП = 240°, KУ= 60° л. б. Определить ИК.
Решение. ИК = 240° — (—60°) == 300°.
Курсовые углы, равные 90° правого и левого борта, называются траверзными, а каждое из траверзных направлений называется траверзом. (О траверзе можете почитать и здесь). Истинный пеленг предмета, находящегося на траверзе, равен истинному курсу плюс (для правого борта) или минус (для левого борта) 90°:
ИП╧ = ИК ± 90°.
Ориентирование корабля в море
§ 10. Понятие о корабельных указателях направлений
Для курсоуказания и определения направлений на различные объекты на кораблях используются специальные приборы и системы. Наиболее распространенными курсоуказателями являются гироскопические компасы, представляющие собой электромеханические устройства, основанные на использовании свойств гироскопа и вращения Земли. Показания основного прибора гирокомпаса передаются следящей системой на репетующие периферийные приборы (репитеры), устанавливаемые в штурманской рубке, на мостике, боевых постах и в других местах корабля.
Если бы главная ось гирокомпаса располагалась точно в плоскости истинного меридиана, то с помощью такого компаса можно было бы определять непосредственно истинные направления. Однако как всякий прибор гирокомпас не свободен от погрешностей в работе, которые вызывают погрешности в показаниях направлений. Ось чувствительного элемента компаса устанавливается не в. плоскости истинного меридиана, а в плоскости своего, так называемого гироскопического или компасного меридиана, направление которого отличается от направления истинного меридиана на величину погрешности. Вследствие этого все направления, измеряемые с помощью гироскопического компаса, отсчитываются от плоскости компасного меридиана, не являются истинными и носят название компасных направлений. Гирокомпас является прибором сложным, требующим квалифицированного ухода и обслуживания, нуждается в источниках питания электроэнергией.
Возможность выхода гирокомпаса из строя вызывает необходимость устанавливать на кораблях, кроме гирокомпаса, другие курсоуказатели, работающие на ином принципе и по возможности не требующие для себя никаких энергетических установок (на некоторых кораблях и судах установка дорогостоящего гирокомпаса вообще нецелесообразна). Прибором, заменяющим или дублирующим гирокомпас, отличающимся простотой устройства, автономностью и большой живучестью, является магнитный компас. Устройство магнитного компаса основано на использовании известного свойства свободно вращающейся на вертикальной оси магнитной стрелки устанавливаться в направлении силовых линий внешнего магнитного поля. Известно, что на поверхности Земли магнитные силовые линии имеют направление от южного магнитного полюса к северному. Следовательно, положение свободно подвешенной магнитной стрелки может быть использовано в качестве начала для отсчета направлений курса и пеленга.
Основная часть магнитного компаса состоит из нескольких параллельно скрепленных между собой магнитных стрелок. Для производства отсчетов направлений (курса, пеленга) система стрелок скреплена с картушкой, представляющей собой легкий диск, разделенный по круговой системе от 0 до 360°. Нуль картушки совпадает с направлением магнитной оси системы стрелок. Картушка вместе со стрелками укреплена на поплавке, который своей топкой посажен на острие шпильки, являющейся вертикальной осью вращения системы. Вращаясь на шпильке, картушка своей магнитной осью стремится установиться в направлении действия магнитных силовых линий поля, окружающего компас. Для уменьшения трения топки поплавка о шпильку и для погашения колебания картушки на качке поплавок вместе с картушкой и системой магнитных стрелок помещается в котелок, заполненный жидкостью.
В зависимости от места установки магнитных компасов на кораблях они называются:
— главными магнитными компасами (МК гл), которые устанавливаются на мостиках и служат для определения направлений на различные объекты в море и на берегу, а также для расчета курсов на переход;
— путевыми магнитными компасами (МКп), которые устанавливаются на постах управления рулем и предназначены для удержания рулевым заданного курса корабля.
Для измерения направлений на наблюдаемые объекты магнитный компас (как и гироскопический) снабжается дополнительным устройством — пеленгатором.
Помимо гироскопического и магнитного компасов, для определения направлений в море могут использоваться и другие гироскопические указатели направлений. Примером таких указателей являются гироазимуты. Гироазимут представляет собой гироскопическое устройство, которое, будучи установленным в заданном направлении, определенное время удерживает его с необходимой точностью.
В последнее время для определения направлений в море стали использовать системы курсоуказания навигационных комплексов, в которых показания различных курсоуказателей осредняются и сглаживаются, чем повышается точность их показаний, устойчивость и надежность работы.
§ 11. Понятие о магнитном поле Земли
Магнитное поле Земли характеризуется в каждой его точке напряженностью и направлением магнитных силовых линий. Напряженность магнитного поля есть сила, действующая на единицу магнитной массы положительного наименования. Напряженность магнитного поля выражается в эрстедах. Силовые линии магнитного поля Земли направлены от южного магнитного полюса к северному и имеют вид замкнутых кривых. Вследствие этого в разных точках земной поверхности они направлены под разными углами к плоскости истинного горизонта. В точках, называемых магнитными полюсами, они направлены вертикально.
Линия вокруг Земли, проходящая примерно посредине между магнитными полюсами, на которой магнитные силовые линии земного поля горизонтальны, называется магнитным экватором. Положение магнитных полюсов для эпохи 1955 г. определяется следующими приближенными координатами:
северный магнитный полюс φ = 74°N; λ = 100°W;
южный магнитный полюс φ = 69°S; λ = 145°Ost.
Положение магнитных полюсов с течением времени медленно, но непрерывно изменяется.
Напряженность магнитного поля, или полная сила земного магнетизма в данной точке земной поверхности, может быть изображена вектором Т, совпадающим с направлением магнитных силовых линий (смотрите рисунок). Разложив вектор Т на две составляющие—горизонтальную Н и вертикальную Z получим:
H = Т * cos I и Z = Т sin I или Z = H * tg I.
Пример 1. Пусть склонение, показанное на карте, отнесено к 1955 г. и равно 4,5° Оst, годовое уменьшение склонения 0,12°. Требуется рассчитать величину и знак склонения в 1969 г.
Решение. Общая величина изменения склонения за промежуток времени от 1955 до 1969 г. рассчитывается так:
1969— 1955 = 14 лет.
0,12° X 14 ≈ 1,7°.
Приводя склонение к году плавания, нужно помнить, что склонение есть угол между плоскостями истинного и магнитного меридианов, а следовательно, уменьшение или увеличение его относится к самому углу (т. е. к абсолютной величине склонения, а не к его знаку). Зная склонение в 1955 г. и общее изменение его за весь промежуток времени, прошедший от 1955 г. до года плавания, легко найти и склонение в 1969 г.; 4,5°—1,7°= 2,8°. Поскольку склонение в 1955 г. было восточным, то и уменьшенной его величине ставим знак плюс: d69 = 2,8°0st.
Пример 2. Магнитное склонение, показанное на карте, равно 0,6° W и отнесено к 1955 г. Годовое уменьшение 9′. Рассчитать магнитное склонение в 1968 г.
Решение. Общее уменьшение склонения за 13 лет равно 9′ x 13 = 117′ = 1,95° ≈ 2°. Уменьшение угла, равного 0,6°, на 2° можно осуществить только с переходом через 0. Следовательно, для эпохи 1968 г. магнитное склонение будет равно 1,4°Ost.
На морских навигационных картах склонение приводится, как правило, для отдельных точек района, охватываемого картой. Для нахождения склонения в заданной точке нужно произвести интерполяцию на глаз между ближайшими точками, для которых склонение показано на карте.
К непериодическим колебаниям магнитного склонения относятся магнитные бури. Магнитные бури продолжаются от нескольких часов до нескольких суток и имеют связь с солнечной активностью. Во время магнитных бурь магнитное склонение может колебаться в довольно широких пределах; амплитуда суточных изменений склонения может достигать в приполюсных областях даже нескольких десятков градусов. Учесть в штурманской практике такие колебания, как правило, не удается.
В некоторых районах земной поверхности можно наблюдать резкое отклонение величины и знака магнитного склонения от значений в близлежащих точках. Такие районы называются районами магнитных аномалий. Магнитные аномалии вызываются залежами магнитных руд в земной коре. На морских картах районы аномалий обводятся сплошной жирной линией.
§ 12. Магнитные направления
Магнитными направлениями принято называть направления, измеряемые относительно вертикальной плоскости, в которой располагается свободно подвешенная магнитная стрелка, находящаяся под действием только магнитного поля Земли. Как было указано в предыдущем параграфе, плоскость, в которой расположится магнитная стрелка, испытывающая на себе воздействие только магнитных силовых линий земного поля, называется плоскостью магнитного меридиана.
Следовательно, магнитные направления есть направления, измеряемые относительно плоскости магнитного меридиана. К таким направлениям относятся магнитные курсы и пеленги.
Магнитным курсом (МК) называется угол в плоскости истинного горизонта между плоскостью магнитного меридиана и носовой частью диаметральной плоскости корабля (рисунок). Магнитный курс отсчитывается от северной части магнитного меридиана по часовой стрелке и может иметь значения от 0 до 360°.
Магнитным пеленгом (МП) называется угол в плоскости истинного горизонта между северной частью магнитного меридиана и направлением на наблюдаемый ориентир. Магнитный пеленг отсчитывается от северной части магнитного меридиана и может принимать значения от 0 до 360°. Как видно из рисунка, магнитные направления (курсы и пеленги) отличаются от истинных на величину магнитного склонения:
В формулах (21) магнитное склонение d принимается со своим знаком, т. е. восточное—со знаком плюс, западное—со знаком минус. Таким образом, измерив в данном месте земной поверхности с помощью компаса магнитное направление, зная величину и знак склонения, всегда можно рассчитать истинные курс и пеленг. Магнитные направления, как и истинные, могут быть прямыми и обратными. Направление, противоположное магнитному направлению на предмет, является обратным магнитным пеленгом (ОМП). Обратный магнитный пеленг отличается от прямого магнитного пеленга на 180°. Как видно из рисунка, магнитный курс и магнитный пеленг (аналогично истинным направлениям) связаны между собой формулой
МП = МК + КУ (22)
где КУ принимается со знаком плюс, когда наблюдаемый предмет расположен по правому борту, и со знаком минус, если предмет наблюдается с левого борта. Если КУ выражен в круговом счете, то в формуле (22) он всегда принимается со знаком плюс.
Пример 1. ИК= 27,0°, d = — 3,0°. Рассчитать МК.
Решение. МК = ИК — d = 27,0° — (—3,0°) = 30,0°.
Пример 2. МП = 324,0°, d = + 5,0°. Рассчитать ИП.
Решение. ИП = МП + 4 = 324,0° + (+5,0°) = 329,0°.
§ 13. Понятие о магнитном поле корабля. Девиация магнитного компаса
Корпуса кораблей, мачты, надстройки, вооружение и механизмы изготовляются из стали, железа, чугуна и других металлов, обладающих свойствами намагничиваться в магнитном поле Земли и создавать в окружающем их пространстве свое магнитное поле. Вследствие намагничивания в магнитном поле Земли сам корабль становится как бы большим магнитом, магнитное поле которого накладывается на магнитное поле Земли. В результате система стрелок магнитного компаса, установленного на корабле, оказывается одновременно под воздействием сил земного магнитного поля и магнитного поля корабля. Следствием этого является отклонение системы магнитных стрелок компаса от направления магнитного меридиана. Это отклонение в зависимости от направления равнодействующей всех сил, которые действуют на стрелку компаса, может произойти к востоку или к западу от магнитного меридиана.
Вертикальная плоскость, в которой расположится стрелка компаса, установленного на корабле, называется плоскостью компасного меридиана. Явление отклонения стрелки компаса от плоскости магнитного меридиана под влиянием магнитных полей корабля и его устройств получило название девиации магнитного компаса. Девиация магнитного компаса измеряется углом между плоскостью магнитного меридиана и плоскостью компасного меридиана. Девиация обозначается греческой буквой δ (дельта). Если плоскость компасного меридиана расположена правее плоскости магнитного меридиана, девиация будет восточной (Оst) и тогда ей приписывается знак плюс, если плоскость компасного меридиана расположена левее плоскости магнитного меридиана, девиация будет западной (W) и ей приписывается знак минус. Девиация магнитного компаса может принимать значения от 0 до 180° в зависимости от магнитного состояния корабельного железа и его расположения относительно стрелки компаса.
Кроме магнитных полей корабельного железа, на кораблях имеется много источников электромагнитных полей: электропроводка, генераторы, электромоторы и др.
Девиация магнитного компаса, появляющаяся под действием магнитных полей проводников, находящихся под током, генераторов, электромоторов и различного электрооборудования корабля, называется электромагнитной девиацией.
Для уменьшения влияния на компас корабельного железа все части компаса делаются из немагнитных материалов, сам компас устанавливается на корабле по возможности дальше от его металлических частей, а близкие к компасу устройства стремятся сделать из немагнитных материалов. При установке компаса на корабле принимаются меры и к тому, чтобы поблизости не было источников электромагнитных полей.
Девиация магнитного компаса периодически уменьшается (компенсируется). Для этого в непосредственной близости от стрелок компаса помещаются специальные магниты и мягкое железо в виде шаров, брусков, пластин, которые создают магнитные поля, равные полям от корабельного железа, но по направлению им противоположные. В результате компенсации девиации стрелка компаса должна возвратиться в плоскость магнитного меридиана, но обычно полностью скомпенсировать магнитные поля не удается; значит, не удается и полностью уничтожить девиацию. У компаса после компенсации остается девиация, называемая остаточной, которая тщательно определяется по величине и знаку и затем учитывается при обработке направлений, измеряемых с помощью магнитного компаса.
Электромагнитная девиация компенсируется путем регулировки силы тока в специальных компенсационных катушках, располагаемых внутри нактоуза компаса под его котелком. Способы компенсации девиации магнитного компаса и определения остаточной девиации подробно излагаются в курсе «Девиация магнитного компаса».
Девиация магнитного компаса не остается постоянной, а изменяется от ряда причин: изменения кораблем магнитной широты, изменения магнитного состояния корабля, т. е. степени его намагниченности, и от положения корабля относительно направления магнитных силовых линий (от курса корабля).
По результатам, определения остаточной девиации, которая у правильно установленных компасов не превышает, как правда, 2—5°, составляются для всех корабельных магнитных компасов таблицы и графики девиации. Образец такой таблицы приводится ниже.
Таблица девиации главного магнитного компаса
| δ | Компасные курсы | δ | |
| +2,3° | 0° | 360° | + 2,3° |
| +1,7 | + 2,5 | ||
| +1,3 | + 2,7 | ||
| + 1,0 | + 3,0 | ||
| + 0,5 | + 3,5 | ||
| 0,0 | + 3,7 | ||
| — 0,7 | + 4,0 | ||
| — 1,5 | + 4,3 | ||
| — 2,0 | + 4,5 | ||
| — 2,7 | + 4,5 | ||
| — 3,3 | + 4,3 | ||
| — 3,7 | + 4,0 | ||
| — 4,0 | + 3,5 | ||
| — 4,3 | + 2,7 | ||
| — 4,0 | + 2,0 | ||
| — 3,7 | + 1,3 | ||
| — 3,3 | + 0,3 | ||
| — 2,5 | — 0,7 | ||
| — 1,7 | — 1,7 |
§ 14. Компасные направления.
В результате суммарного воздействия магнитных полей Земли, корабельного железа и электрических устройств стрелка магнитного компаса устанавливается в плоскости компасного меридиана. Направления относительно плоскости компасного меридиана называются компасными направлениями. К ним относятся компасные курсы и компасные пеленги. Компасным курсом (КК) называется угол, заключенный между плоскостью компасного меридиана и носовой частью диаметральной плоскости корабля. Компасный курс отсчитывается от северной части компасного меридиана по направлению движения часовой Стрелки от 0 до 360°. Компасным пеленгом (КП) называется угол, заключенный между северной частью компасного меридиана и направлением на наблюдаемый ориентир. Компасный пеленг отсчитывается от северной части компасного меридиана по движению часовой стрелки от 0 до 360°.
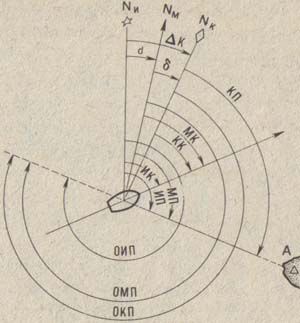
На основании изложенного выше об истинных, магнитных и компасных направлениях следует заключить, что наблюдатель при пользовании магнитным компасом на корабле имеет дело с тремя меридианами: истинным (географическим), магнитным и компасным (смотрите рисунок). В зависимости от того, какой меридиан принят за начало отсчета направлений, наблюдатель будет получать истинные, магнитные или компасные направления.
Связь компасных направлений с магнитными выражена формулами;
В формулах (23) девиация магнитного компаса принимается со своим знаком плюс или минус. Компасные направления, так же как и магнитные, могут быть и прямыми и обратными. Направление, отличающееся от компасного пеленга на 180°, называется обратным компасным пеленгом (ОКП).
Зависимость компасного пеленга, компасного курса и курсового угла выражается формулой
где КУ принимается в зависимости от наименования борта со знаком плюс или минус.
На морских навигационных картах нанесены географические меридианы и параллели. Поэтому линии курсов и пеленгов на картах всегда проводятся относительно географического, т. е. истинного меридиана. Удержание же корабля на заданном курсе и измерения направлений с помощью компаса производятся относительно компасного меридиана.
 Поэтому важно твердо знать связь между истинными и компасными направлениями. Эта связь, которую легко можно проследить на рисунке, выражается следующими формулами:
Поэтому важно твердо знать связь между истинными и компасными направлениями. Эта связь, которую легко можно проследить на рисунке, выражается следующими формулами:
ИК = КК + δ + d
ИП = КП + δ + d (25)
В случае необходимости перехода от верных (истинных) направлений к неверным (компасным) следует использовать формулы:
На основании формул (20), (22), (24) можно написать
Решение. МК = КК + δ = 48,0° + (+2,0°) = 50,0°.
Пример 2. КК = 226,0°, δ = — 2,0°, d = + 5,2°. Определить ИК.
Решение. ИК = КК + δ + d = 226?0° + (- 2,0°) + (+5,2°) = 229,2°.